- 입력 2019.10.11 04:00
강한 빛 비추거나 온도 매우 높아도 동작 멈춰…오탐지 낮추려고 '센서 퓨전' 방식 도입
자동차 사고와 기타 일반정비 시 ADAS 센서 정비 필요…정기 정비 또는 검사항목에 넣어야

[뉴스웍스=손진석 기자] 지난해 4월 미국에서 테슬라가 오토파일럿 모드로 주행 중 태양의 역광에 의해 발생한 센서 인식률 저하로 인명사고가 발생해 자율주행차의 안전성 논란이 됐다.
이는 차의 ADAS 센서에서 차량 주변 탐지를 위해 발생하는 빛 혹은 파장 등이 태양의 역광에서 발생하는 파장이 일치하는 경우가 발생해 물체에서 발생한 것인지 햇빛에서 온 것인지 판단할 수 없어서 발생한 사고다.
ADAS의 보급이 증가하면서 자율주행모드를 작동해 주행 중 발생한 사고에 대한 이야기를 종종 듣게 된다. 그러나 조사결과는 대부분 운전자의 과실로 밝혀졌다.
사고를 예방하고 교통사고를 줄여 ‘무사고’를 목표로 하는 ADAS로 인해 사고가 발생하는 이유는 무엇일까.
무엇보다 자동차를 조정하는 통제의 권한에 대한 정의와 사고 상황에서 발생하는 ‘트롤리의 딜레마’에 대한 문제를 해결하지 못하고 있기 때문이다. 트롤리의 딜레마는 사고 상황에서 승객과 보행자 중 누구의 안전을 우선해야하며, 사고의 책임을 차량 소유자와 제조사 중에 어디에 둘 것인가 하는 등의 문제로 다양한 각도로 검토 중에 있다.
◆인지범위 한계와 악천후 등에서 센서 오류 발생
주행 중 스마트 크루즈 컨트롤 기능(자율주행모드)를 작동시켜서 정상 주행을 하는 중 옆에서 급작스럽게 끼어드는 차로 인해 놀란 경험이 한두 번쯤을 있을 것이다. 이처럼 ADAS 센서들은 명확한 한계점을 가지고 있다.
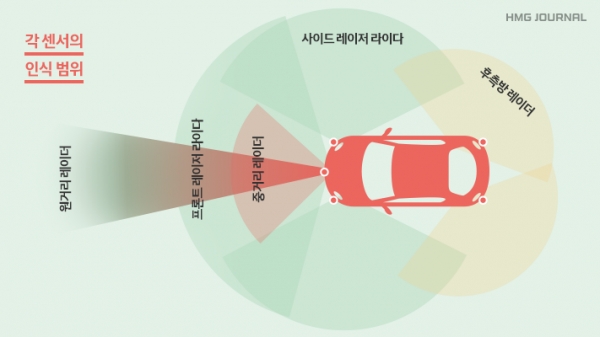
자율주행차는 대부분 카메라, 레이더(Radar), 라이다(LiDAR) 센서를 혼용해 사용한다. 현재 사용되고 있는 자율주행차 센서는 카메라와 레이더를 묶어서 적용하고 있다. 자율주행에서 주변 환경에 대한 인지를 위해 사용되는 센서들은 각각의 장·단점이 있어 상호 보완해 사용하게 된다.
이러한 센서들은 눈·비·안개 등 악천후와 보행자·자전거 운전자 크기가 1m 이하인 경우와 20㎝ 이하 크기의 물제는 인식하지 못한다.
차량의 자세 변화 즉 센서의 검측 각도 변화, 주행 중 차량 측면에서 갑자기 끼어드는 차 등에 대해서는 센서가 인식하지 않을 확률이 높다. 또 좌·우회전 상황에서 반대 방향 차량과 맞닿을 경우와 오르막길에서 도로 위에서 구조물이 있는 곳을 주행할 경우 정상작동 하지 못한다.
그 외에 태양광 등 강한 빛이 비추는 경우, 센서의 온도가 매우 높은 경우, 터널 혹은 야간 등 주위가 어두운 경우에 헤드램프를 켜지 않을 경우 등에 대해 센서는 작동을 멈추게 된다.
이러한 문제를 해결하기 위해서 자율주행에 필요한 센서는 고성능이 돼야하고, 다양한 종류의 센서가 최대한 많이 장착될수록 외부환경 변화에 민감하고 정확하게 작동하게 된다.
업계에서는 주변상황에 대한 인지범위와 반응속도의 증가를 위해 최근 여러 개의 센서를 하나로 결합하는 '센서 퓨전(Sensor Fusion)' 방식을 도입하고 있다.
완전자율주행을 위한 빠른 기술 개발과 함께 적극 수용되고 있는 센서 퓨전은 센서들을 중복 적용해서라도 오탐 확률을 0%까지 줄이기 위한 노력이다.
센서는 각각 기능별로 역할과 장단점이 있기 때문에 각 센서의 장점을 합칠 필요가 있다. 야간이나 눈비, 강한 역광 등의 인식이 어려운 조건에서도 확실한 인식이 필요하기 때문이다.
ADAS에서 센서 퓨전은 카메라, 레이더, 라이다, 초음파 등의 센서끼리 결합과 다른 기타 센서들과 결합을 통해 센서의 인식율을 높이고 있다.
안개가 있으면 카메라를 통해 얻는 정보가 부정확하기 때문에 라이더와 레이더 등의 정보를 통해 부족한 정보를 획득해 좀 더 정확한 판단을 할 수 있다.
이처럼 센서의 통합을 통해 부족한 다른 센서의 장점을 모두 사용 할 수 있게 할 수 있다. 이는 예측할 수 없는 주행 상황에서 복잡하고 자율적인 기능을 가능하게 하고 기존 센서의 오류를 줄일 수 있다.

◆ADAS 센서, 일반정비로는 센서 오작동 막기 어려워
ADAS가 적용된 차량이 늘어남에 따른 점검정비의 필요성도 높아지고 있는 추세다.
경미한 수리를 포함해 사고 수리, 전면 유리 교체, 휠 얼라인먼트 등의 경우에도 레이더와 카메라 시스템을 재조정해야 ADAS가 정상적으로 작동하기 때문이다.
하지만 ADAS를 장착한 신차 비율이 증가하면서 교통사고로 인한 부품 교체 시 국내 대다수 자동차 정비 관련 업체들이 ADAS 부품에 대한 정비 매뉴얼을 제대로 갖추고 있지 않는 것으로 나타났다.
정비 업체들은 “ADAS 관련 부품 고장 시 전용 스캐너(진단기)를 사용해 문제점을 찾을 수 있고, 대부분 소프트웨어(SW)가 아닌 부품의 문제로 판명되어 부품 교환을 한다”며 “부품별로 차량 내 부착 위치가 달라 얼마든지 부분 수리가 가능하다”는 입장이다.
현실은 그렇지 않다는 주장도 나온다. 자동차 제작사 정비업무 담당자는 “ADAS는 전면유리 또는 프런트 범퍼 등을 교환하는 사고차 수리 이외에도 리어 액슬 토 조정 등 휠 얼라인먼트 작업과 ADAS 관련 센서의 교환·정비 및 사고차 수리의 경우와 센서 불량, 일반적인 정비작업, 시스템 업그레이드, 노후차 및 노면 충격 등으로 인한 관련 센서의 위치가 변형된 경우 센서 보정을 하지 않으면 오작동으로 인한 2차적인 사고 위험이 높다”고 설명했다.
ADAS 관련 센서는 1도 미안의 미세한 변화의 경우 자체적인 캘리브레이션(0점 조정)을 통해 정상작동이 가능하다. 그러나 이를 넘어설 경우 경고등이 점등되거나 시스템이 작동하지 않는 등 고장이 발생한다. 경우에 따라서는 세이프티모드(안전운행모드)로 운전이 제한되기도 한다.
하지만 아직까지 ADAS의 점검정비와 관련해 전 세계적으로 법규나 스탠다드가 정해진 것은 없다. 국내에서도 이러한 문제에 관심을 가지고 있는 이들이 없다. 물론 일부 수입차와 국내 완성차 업체들이 사고차를 중심으로 자체적인 수리 및 보정서비스를 제공하고 있기는 하지만 아직은 초기단계에 불과한 수준이다.
이에 따라 국내외에서 휠 얼라인먼트와 같이 ASDA 점검을 정기적인 정비 또는 검사항목으로 지정해야 한다는 움직임이 일고 있다.
업계에서는 자율주행차 판매 시점은 대부분 2020년으로 예상하고 있다. Navigant 리서치는 세계 3대 시장(북미, 유럽, 아시아) 자율차 연간 판매량이 2020년 8000대에서 2035년 9540만대로 연평균 85% 성장할 것으로 전망하고 있다. 한편, 현대자동차는 지난달 말 미국 자율주행업체 앱티브와 협력체계를 구축하며 2024년에는 자율주행차를 양산하겠다고 밝힌 바 있다.
국내외 주요 자동차 제작사에서도 2020년을 기점으로 자율주행자동차 양산계획을 발표하는 등 자율주행자동차는 이미 미래기술 개발이 아닌 현재 진행형 기술로 우리에게 다가오고 있다.