- 입력 2022.10.24 13:00
[뉴스웍스=백진호 기자] 국내 연구진이 인간의 뇌 신호를 해석해 생각만으로 로봇 팔을 원하는 방향으로 제어하는 기술을 개발했다.
24일 한국과학기술원(KAIST)에 따라면 정재승 뇌인지과학과 교수 연구팀이 인간의 뇌 신호를 해석해 훈련을 거치지 않고도 생각만으로 로봇 팔을 제어하는 '뇌-기계 인터페이스 시스템'을 발명했다.
정천기 서울의대 신경외과 교수 연구팀과 공동으로 진행한 연구에서 정 교수 연구팀은 뇌전증 환자를 대상으로 팔을 뻗는 동작을 상상할 때 관측되는 대뇌 피질 신호를 분석해 환자의 팔 움직임을 예측하는 팔 동작 방향 상상 뇌 신호 디코딩 기술을 개발했다. 디코딩 기술은 실제 움직임이나 복잡한 상상을 요구하지 않아 운동장애를 겪는 환자가 훈련을 받지 않아도 로봇 팔을 제어할 수 있다.
로봇 팔 제어를 위한 뇌-기계 인터페이스를 현실화하려면 사람이 팔을 움직일 때 뇌에서 발생하는 전기신호를 측정하고, 기계학습(머신러닝) 등의 인공지능(AI) 분석기법으로 이를 해석해 의도한 움직임을 예측하는 디코딩 기술이 필요하다.
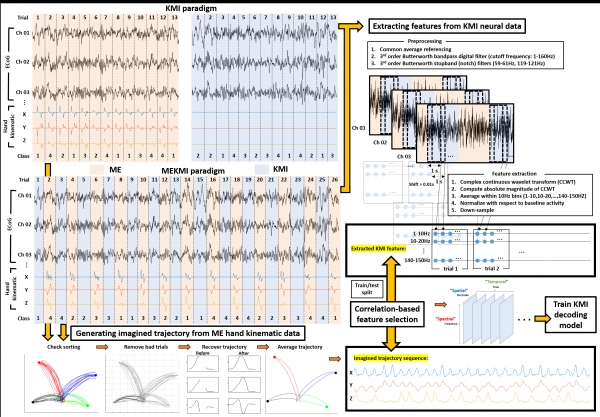
상지 절단 등으로 운동장애를 겪는 환자는 팔을 실제로 움직이기 어려워 상상만으로 로봇 팔의 방향을 지시하는 방법이 필요하다. 뇌 신호 디코딩 기술은 뇌의 상상 신호로부터 팔의 방향을 예측해야 하는데, 이는 실제 뇌 신호보다 낮은 '신호대잡음비'라는 문제에 직면했다. 이를 극복하기 위해 기존 연구에서는 팔을 움직이려 할 때 신호대잡음비가 더 높은 다른 신체 동작을 상상하게 했지만, 사용자가 장기간 훈련을 해야 하는 불편함이 존재했다.
연구팀은 문제를 해결하기 위해 사용자의 자연스러운 팔 동작 상상을 높은 공간해상도의 대뇌피질 신호로 측정하고, 변분 베이지안 최소제곱 기계학습 기법을 활용해 직접 측정이 어려운 팔 동작의 방향 정보를 계산하는 디코딩 기술을 개발했다.
연구팀의 팔 동작 상상신호분석기술은 운동피질을 비롯한 특정 대뇌 영역에 국한되지 않고, 사용자마다 상이한 상상과 대뇌 영역의 특성을 맞춤형으로 학습해 계산 모델 파라미터 결괏값을 출력했다. 이로써 연구팀은 대뇌 피질 신호 디코딩을 통해 환자가 상상한 팔 뻗기 방향을 최대 80% 이상의 정확도로 예측할 수 있었다.
이번 연구 결과는 뇌공학 분야의 국제 학술지 '저널 오브 뉴럴 엔지니어링' 9월 19권 5호에 출판됐다.
